It’s the year 2028. A robot is landing on the southern pole of the lunar surface with one objective – to find resources. With poor visibility due to low lighting, this robot will need to navigate dusty, loose regolith and rocks in its search for water, one of our most valuable resources.
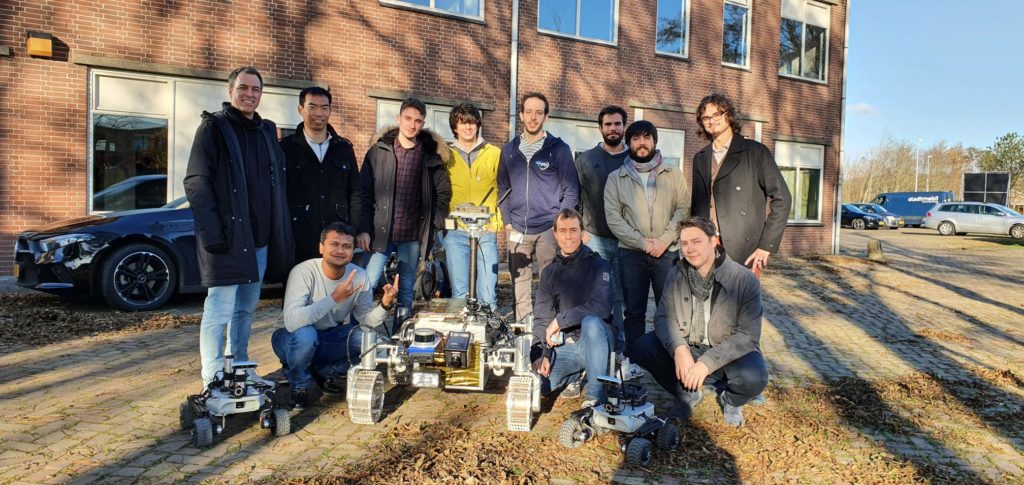
This is the scenario that 13 teams participating in the Space Resources Challenge, hosted by the European Space Agency (ESA) and the European Space Resources Innovation Centre (ESRIC), developed a robot to overcome. The Space Robotics (SpaceR) research group is part of a consortium that comprises the LUnar Volatiles Mobile Instrumentation – eXtended Rover (LUVMI-XR) team, and that has developed a robot to fulfil these conditions in the first stage of the challenge back in November.
This mission is one of significant relevance, since it reflects our true-to-life exploration of resources in space.
The LUVMI-XR team participated in the first stage of the challenge in November
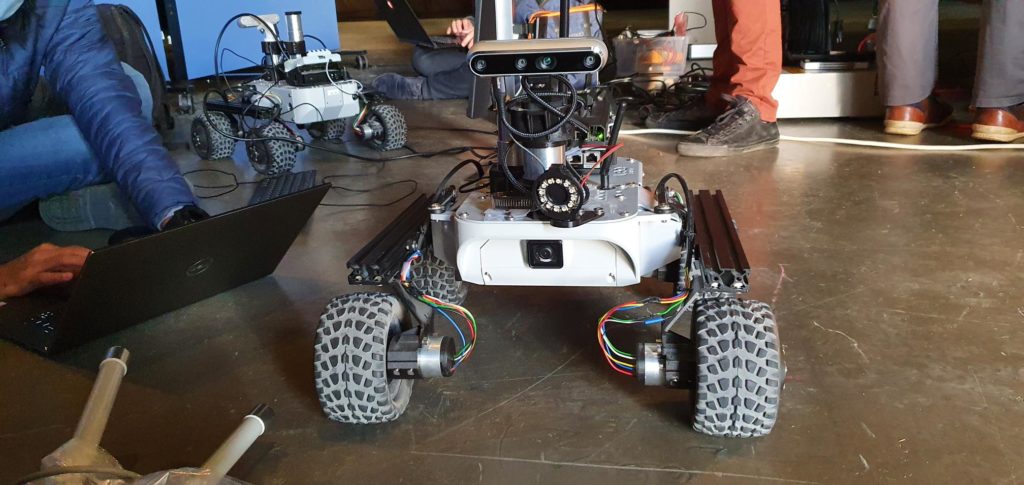
Having announced the challenge back in May, 19 teams put forth their ideas with just 13 advancing to the first stage of the challenge taking place in the Netherlands in late November. Their robots needed to traverse an area of 2500m2 and 14m high in order to locate and characterise resources. The robots can be controlled through a control room on Earth during the two-and-a-half-hour mission, and their task will be to analyse the visual and multi-spectral imagery to make a resource map that can guide future prospectors. Remaining faithful in its replication of the Moon, participants will need to develop a robot that can traverse across loose soil, rock and sand.
“The team unites robotics researchers, instruments specialists, Earth and lunar geologists, with experience of space systems development to propose a realistic mission concept.”
This mission is one of significant relevance, since it reflects our true-to-life exploration of resources in space. While the Moon may appear to be a wasteland, fried daily by the Sun’s radiation that lifts its surface temperature close to 120°C, the south pole is targeted by sunlight at a very low angle. Back in 1998, a NASA prospection mission identified higher measurements of hydrogen in this area, giving clear evidence that water ice was likely to be present within craters that are untouched by sunlight. The conclusive confirmation was provided in 2018, when a team of scientists used data from NASA’s Moon Mineralogy Mapper to definitely prove the presence of water-ice on our natural satellite. The future of our space exploration relies on the extraction of resources like water from our solar system, as this will allow our explorers to venture beyond the safe confines of Earth’s vicinity, within reach of precious, life-sustaining cargo.
The winning team has the chance to be a part of a robotics mission to the Moon
Following the first stage in November, five of the 13 teams will be awarded €75,000 in a development contract with ESA to develop their prototype in preparation for the final field test. The decision will be announced in January 2022, and the second and final stage will take place in October 2022 in Luxembourg’s Rockhal venue, with the winning team taking away €500,000 and the chance to be part of a robotics mission to the Moon.
“[LUVMI-XR’s] team unites robotics researchers, instruments specialists, Earth and lunar geologists, with experience of space systems development to propose a realistic mission concept,” said team leader, Jeremi Gancet from Space Applications Services. Other members of the team include Dynamic Imaging Analytics, CRPG, imec, LPRC and Tohoku University. Together they are developing the LUVMI-X Lunar Rover, a rover specifically designed to travel across shaded regions of the Moon. Prof. Miguel Olivares-Mendez, head of the SpaceR research group, will serve as the group’s principal robotics researcher. Their development has been funded by the European Union’s Horizon 2020 programme.
Our website uses Matomo for audience measurements to improve the site. Privacy policy You can accept or refuse consent by clicking on:Ok, I accept.No, thanks.