Time is money – especially in space. As a host of new lunar expeditions queue up for an eventful year, once they reach our natural satellite, rovers and other spacecraft will only have a limited amount of time to operate before running out of fuel – a.k.a sunlight. Until we can viably leverage in-situ resources like ice and regolith, solar energy will still be the main power source on the Moon (and by far the easiest to harvest).
“Robots without nuclear power will not overcome the night of the Moon, because the temperature gets too low and they simply freeze. This means that missions are expected to have a duration of 14 Earth days, the length of a lunar day, before it gets dark for another 14 Earth days,” said Prof. Miguel Angel Olivares Mendez, head of the Space Robotics (SpaceR) research group at SnT.
Two weeks is a short timeframe for these novel lunar residents to coordinate, negotiate, and possibly cooperate to each accomplish their goal,let alone for robots to involve their respective owners on Earth in local negotiations on how to allocate paths, sites, frequencies, and times. When we eventually transfer these technologies to the exploration of Mars, this will become even more problematic given the 20-minute communication time delay with Earth.
To overcome these problems, we need to enable robots to make business decisions, such as buying or selling Moon map data to another entity, without human intervention. This means empowering them to take autonomous decisions, follow the economic rationale of their owners, and doing so in traceable and public ways – even in absence of a central supervising entity. “This is where distributed ledger technologies come in, thanks to their capability of recording transactions and agreements in an immutable manner,” saidProf. Gilbert Fridgen,head of the Digital Financial Services and Cross-Organisational Digital Transformations (FINATRAX) research group at SnT.
“As rational market participants, robots will most likely allow us to run an economy differently.”
The FiReSpARX research team in the LunaLab
Fridgen and OlivaresMendez are the principal investigators on the “FinTech/RegTech in Space for Trustful Autonomous Robotic Interaction” (FiReSpARX) project, whose team includes researchers Loick Chovet, Eduard Hartwich, Renan Lima Baima, Dr. Alexander Rieger and Dave Van der Meer. This FNR-CORE initiative is an interdisciplinary project of SpaceR and FINATRAX aiming to use distributed ledger technologies to develop space robots that follow a given governance (RegTech) and make autonomous economic decisions (FinTech) to jointly create multirobot systems able to collaborate.
“This is where distributed ledger technologies come in, thanks to their capability of recording transactions and agreements in an immutable manner.”
The project, which kicked off in July 2021, sets out to tackle multiple key challenges. On the robotics side, the goal is to build a new multirobot system architecture that supports distributed ledger technologies. Each robot needs to represent the economic rationale of their owner, bargain conditions of a deal, and trustfully document the result. For example, rovers and landers from different companies could buy and sell map data, or negotiate the priority to operate in a certain area against economic incentives. These transactions, and their records, need to be secured, and at the same time must take place within the computational – a.k.a power – constraints of space, as computing requires a significant amount of energy. This could be accomplished by leveraging edge computing, for example. “As robots execute transactions and communicatewith each other,we are also lookingto provide them with sensor-as-a-service capabilities, to share resources and maximise their potential,” said Olivares Mendez.
On the RegTech/FinTech side, the goal is to design market mechanisms, incentives, and governance frameworks for economic interaction between robots in space – in a nutshell, an entire economic and regulatory system. “We would design a machine economy, and a regulatory framework for robots to interact autonomously in space,” said Fridgen. “This is a completely new field. Sure, we might be able to carry over some of our economic theories – but, the question is, would robots make the same decisions as us humans? Do we expect that a free market would be the most efficient solution for a group of robots, say, on Mars?” he added.
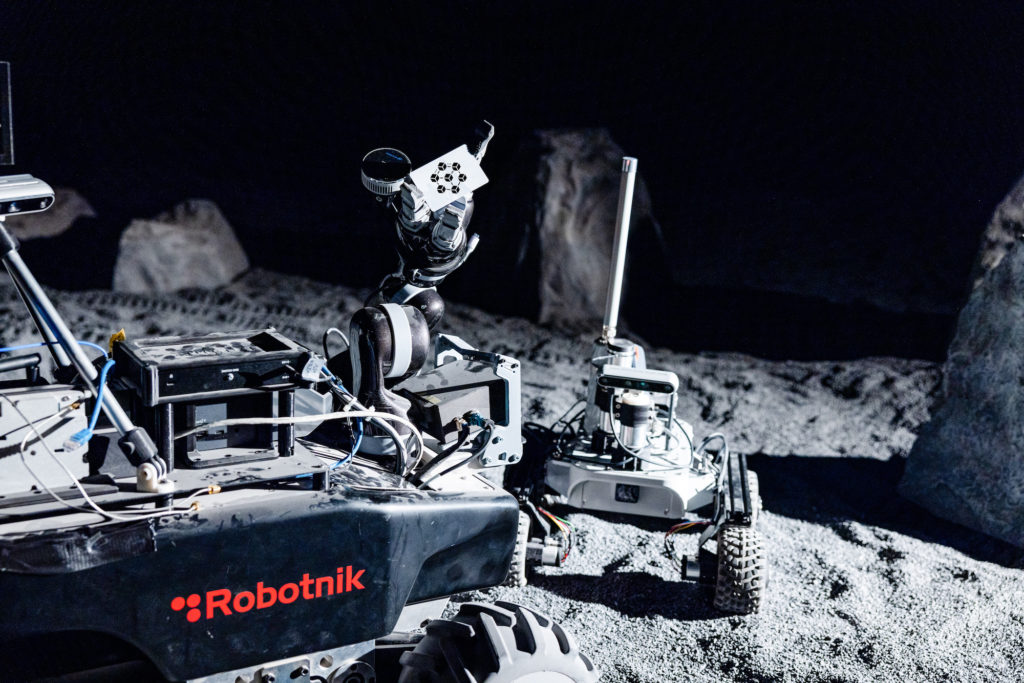
Rovers in the LunaLab
“As rational market participants, robots will most likely allow us to run an economy differently. This is one of the aspects we will be looking at,” said Hartwich, doctoralresearcher on the FiReSpARX project. “Once we do that, we can look at maximising the welfare of an economy where you don’t have to take into account questions of fairness or justice,” he added.
Once ready, the multirobot system prototype will be tested in the LunaLab – SnT’s lunar analogue facility, which opened in 2019. “The interdisciplinary character of SnT is the underlying foundation of FiReSpARX. We came together as a team with competences in aerospace engineering, IT, economics and FinTech. Bringing these areas together is a really unique feature of our research centre,” concluded Fridgen.
Our website uses Matomo for audience measurements to improve the site. Privacy policy You can accept or refuse consent by clicking on:Ok, I accept.No, thanks.